Created by David Perry, Hajin Kim, and Lissa Biltz, Fish out of Water is an interactive, fish robot on the Pololu 3pi robot platform.
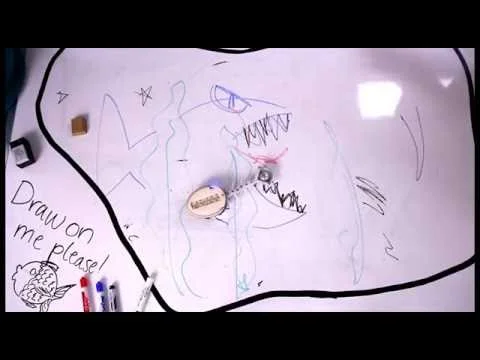
The user draws various things on a whiteboard table, and the fish reacts to them appropriately. On its own, the fish moves in a random, sinusoidal path. However, various obstacles cause the fish to change it behaviors. Darker and thicker drawings are considered major obstacles and threats to the fish, so it turns around and moves in a different direction. Thinner lines are interpreted as beneficial to the fish, so the fish moves through them and makes happy noises.
Originally, our purpose was to make a robotic fish able to interpret user drawings exactly and emulate very real behaviors of a fish in a fish tank like environment. However we realized that the 3pi platform would be unable to sense colors of whiteboard markers easily,and that the behavior of the fish would be too repetitive too quickly. While the user can overall trigger various reactions from the fish, there is a lot of ambiguity in what the fish will decide is a thick or thin line, emulating the fact that the fish has free will. Also the appearance of the fish is not meant to replicate any species of fish specifically. So as each user draws and discovers the reactions of the fish, they are creating their own environment and specific fish in the water.
Narrative
Some people consider looking at fish as a relaxing activity. Amidst the stress culture of CMU, Fish out of Water was designed to calm students down in ordinary places, such as a library or a residence hall. However, since user’s drawings are what influence the fish’s behavior, experiences and result change from person to person.
Given the Pololu 3pi to work with, we sketched our initial idea for how the robot would appear and move. We wanted to keep the rounded center body shape and kept it as the center.
R. Skelly is born! In order to create the waving back and forth motion of the fish, we opted to allow physics to come into play, rather than forcefully try to recreate it with a motor. The tail end is weighed down with a ball weight, while the "spine" is created using laser cut wood and screws in a bike chain-like fashion.
Projects made while taking 60-130 "Hey Robot Let's Make Something".
Face model is my own face scanned using photogrammetry. Mold for candle was made by CNC routing out of foam, and then vacuum forming the plastic mold. Final model was then poured in layers into the plastic mold.